Konfiguracja i edycja Robota głosowego
Tworzenie złożonego i efektywnego scenariusza dialogowego wymaga potężnych i elastycznych narzędzi. Strona edycji Robota głosowego UniTalk to wizualny kreator, w którym budujesz drzewo dialogu (Flowchart), zarządzając każdą jego gałęzią poprzez system węzłów (Nodes), warunków oraz akcji. Daje Ci to możliwość nie tylko automatyzacji odpowiedzi, ale także precyzyjnej kontroli nad tym, jak klient porusza się w scenariuszu, zapewniając maksymalną trafność i szybkość obsługi jego zapytania. Przyjrzyjmy się szczegółowo elementom sterującym, które zmienią Twój pomysł w działający algorytm.
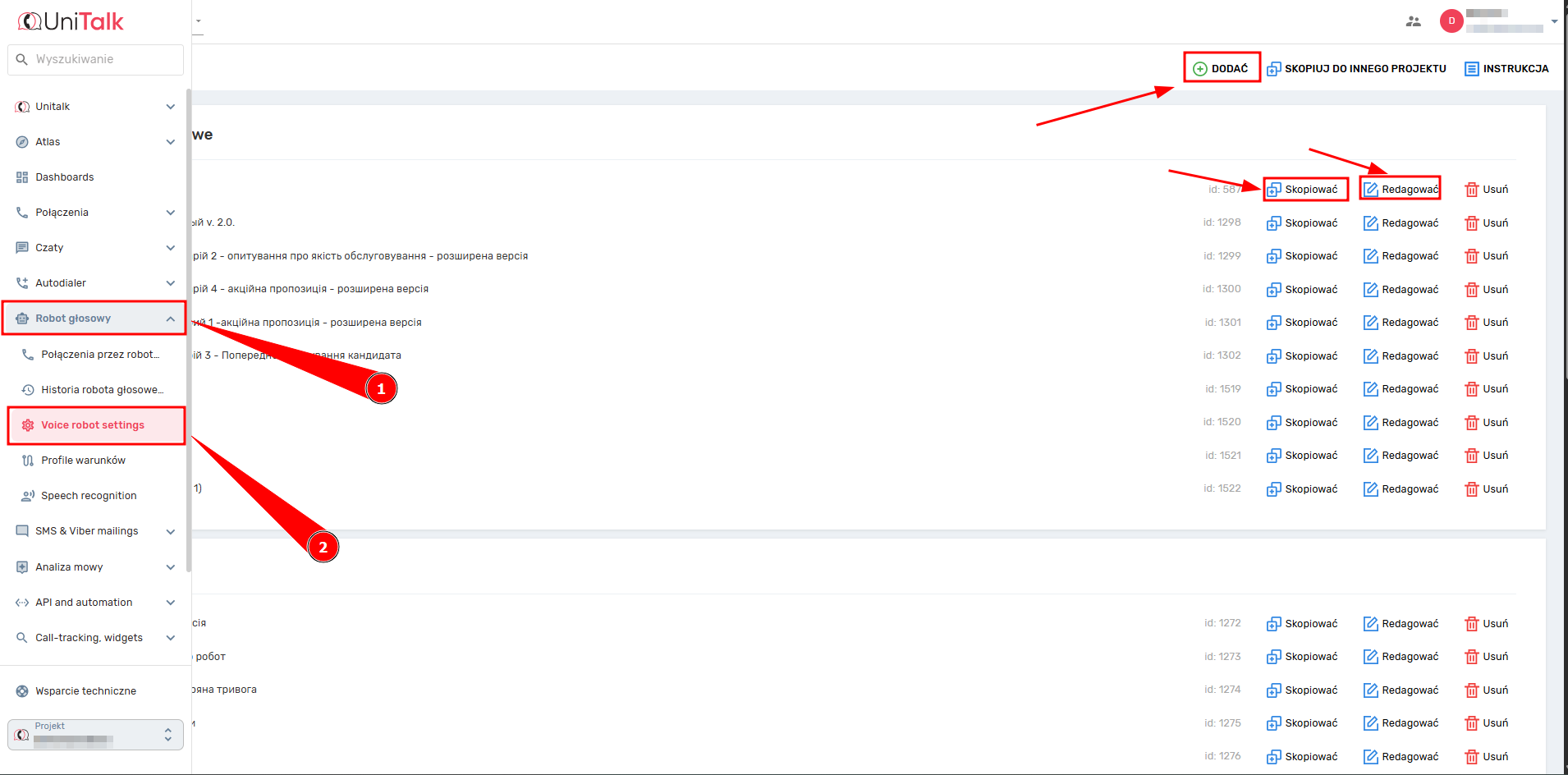
Dostęp do strony edycji Robota głosowego można uzyskać tylko ze strony robota głosowego, klikając przycisk Edytuj, Dodaj lub Kopiuj.
Robot głosowy ma podstawowe ustawienia, do których można uzyskać dostęp, klikając koło zębate u góry strony i z drzewa dialogowego.

Drzewo dialogowe składa się z węzłów.

Węzły mają następujące składniki:
- Warunki przejścia węzła – są to warunki, w których zostanie wykonane przejście z węzła nadrzędnego do bieżącego węzła.

- akcja węzła, która zostanie wykonana po przejściu do węzła. Kliknięcie bloku akcji otwiera panel ustawień akcji węzła.

Węzły mają również:
- węzły podrzędne – węzły, do których zostanie wykonane przejście z bieżącego węzła. Węzły podrzędne są oznaczone niebieską strzałką. Węzły podrzędne mogą jednak nie istnieć.

- Przycisk dodawania węzłów podrzędnych – przycisk, którego naciśnięcie powoduje dodanie węzła podrzędnego. W niektórych przypadkach może go brakować.

- Przycisk usuwania węzła – przycisk, którego naciśnięcie powoduje usunięcie węzła z drzewa. Jest on nieobecny w głównym (pierwszym) węźle.

- id (identyfikator węzła) – używany podczas wyświetlania błędów przechowywania, może być wysyłany w webhookach przetwarzania zdarzeń. Unikalny w obrębie jednego robota.

Sterowanie Robotem głosowym
1. Przycisk Zapisz powoduje zapisanie robota głosowego.

2. Przycisk „Ustawienia główne” otwiera panel z głównymi ustawieniami robota.

3. Przyciski powiększania i pomniejszania powiększają i pomniejszają drzewo. Bieżąca wartość powiększenia jest wyświetlana pośrodku. Skalę można również zmienić, obracając kółkiem myszy.

4. Przycisk Cofnij umożliwia anulowanie wszelkich zmian wprowadzonych w robocie. Jeśli przycisk jest szary, jest nieaktywny, co oznacza, że nie wprowadzono jeszcze żadnych zmian, które można cofnąć.

5. Przycisk Redo (Cofnij) anuluje przycisk Undo (Cofnij), tj. przywraca zmiany, które zostały anulowane. Jeśli przycisk jest szary, nie jest aktywny, tzn. przycisk Cofnij nie został naciśnięty.

6. Poruszaj się po obszarze roboczym za pomocą drzewa. Jeśli drzewo jest zbyt duże, aby zmieścić się na ekranie, przytrzymaj lewy przycisk myszy na szarym obszarze i przeciągnij drzewo.

Ustawienia podstawowe Robota głosowego
Kliknięcie koła zębatego u góry ekranu spowoduje otwarcie głównych ustawień robota na pasku bocznym ustawień.

Menu z głównymi ustawieniami Robota głosowego wygląda następująco.

- „Name” (Nazwa) – nazwa robota głosowego, do 100 znaków.
- „Make background” (Utwórz tło) – to ustawienie jest dostępne tylko podczas tworzenia nowego robota głosowego. Jeśli ustawienie jest włączone, robot zostanie utworzony jako robot tła. Po utworzeniu go jako robota tła nie można go przekształcić w zwykłego robota i odwrotnie.

- „Robot w tle – przekazywanie połączeń” to ustawienie, które nie ma wpływu na logikę robota głosowego i jest używane w historii robotów. Dostępne tylko dla robotów w tle.
- „Ustawienia rozpoznawania mowy” – ustawienie niedostępne dla robotów działających w tle.
- „Ustawienia syntezy mowy” – wybiera profil ustawień syntezy mowy, który będzie używany do syntezy dźwięku. Wymagane, jeśli synteza mowy jest obecna w dźwięku robota.
- „Jeśli synteza audio nie powiedzie się” – ustawienie, które określa, co zrobić, jeśli synteza audio nie powiedzie się. Nie jest dostępne dla robotów w tle.
- Dialogi w tle (przycisk „Dodaj dialog w tle”) – ustawienia dla robotów w tle. Niedostępne dla robotów działających w tle.
- „Add robot start event handler” – ustawienie umożliwiające dodanie do 5 programów obsługi zdarzeń, które będą wywoływane po uruchomieniu robota.
- „Add a robot termination event handler” – ustawienie umożliwiające dodanie do 5 programów obsługi zdarzeń, które będą wywoływane po zakończeniu działania robota.
Pasek boczny z ustawieniami
W takich przypadkach potrzebny jest pasek boczny z ustawieniami:
- podczas edytowania podstawowych ustawień robota (klikając koło zębate u góry)
- podczas edycji ustawień warunków węzła (klikając blok warunków węzła)
- podczas edycji ustawień akcji węzła (klikając blok akcji węzła)
We wszystkich przypadkach panel działa na tej samej zasadzie.
Aby zapisać ustawienia, kliknij przycisk „Zastosuj zmiany” w prawym górnym rogu, ale to tylko zapisuje ustawienia w pamięci przeglądarki, nie zapisuje robota.

Aby zapisać robota, kliknij przycisk „Zapisz” znajdujący się w górnej środkowej części ekranu.

Na przykład, jeśli masz już istniejącego robota i chcesz zmienić jego podstawowe ustawienia, musisz wykonać następujące czynności:
- kliknąć koło zębate
- zmienić wymagane ustawienia
- kliknąć przycisk „Zastosuj zmiany” w panelu ustawień
- kliknąć przycisk „Zapisz” u góry strony.
Panel zamyka się po kliknięciu krzyżyka, przycisku „Zastosuj zmiany” lub naciśnięciu klawisza Esc.
Konfigurowanie bloku stanu węzła
Ustawienia warunków opisują warunki, w których można wykonać przełączenie do bieżącego węzła.

W niektórych przypadkach węzeł może nie mieć bloku warunku. Na przykład, węzeł główny zwykłego robota wygląda następująco:

Po kliknięciu bloku warunków otworzy się pasek boczny z ustawieniami warunków przejścia do węzła.
Opis ustawień warunków
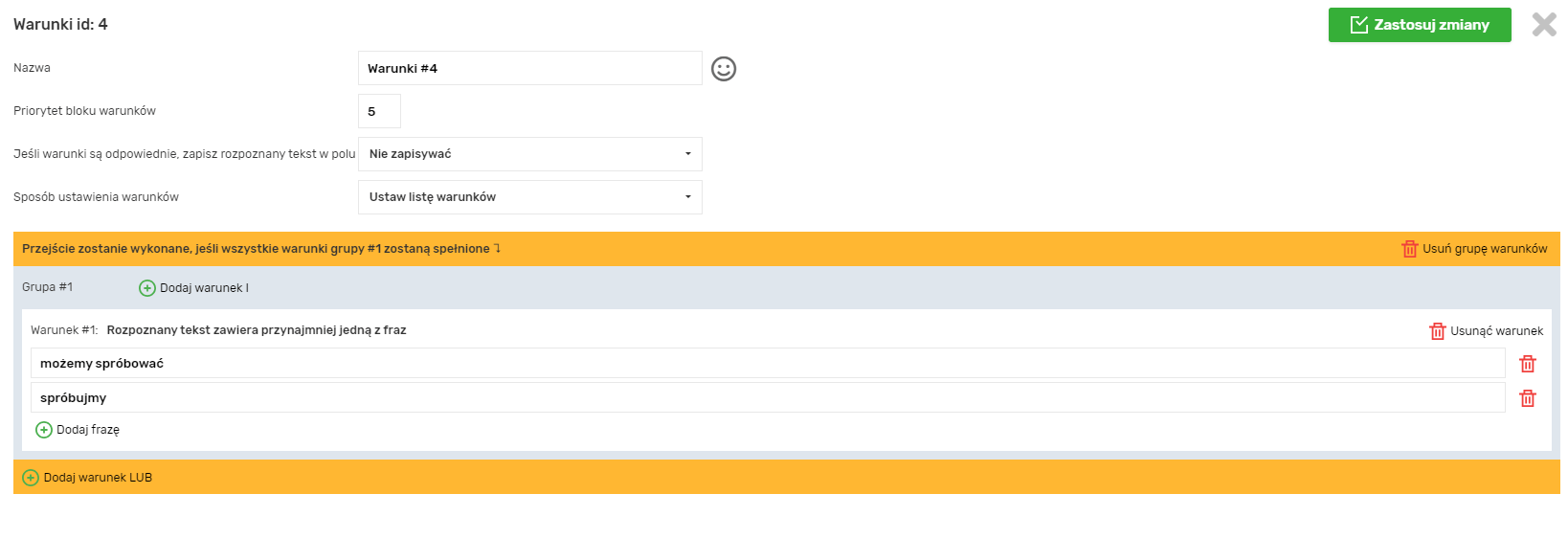
- Nazwa – nazwa bloku z warunkami wyświetlana w węzłach drzewa. Maksymalna długość nazwy wynosi 25 znaków. Po prawej stronie pola znajduje się również emoji, które można kliknąć, aby dodać emotikonę. Jeśli nie znajdziesz potrzebnego emoji na liście, możesz je skopiować i wkleić do pola z dowolnego miejsca.

- Priorytet bloku warunków – od 1 do 10, określa kolejność, w jakiej sprawdzane będą warunki sąsiednich węzłów. Im wyższy priorytet, tym wcześniej zostanie sprawdzony.
Przykład: podczas połączenia robot głosowy dociera do węzła o id=3, który ma 2 węzły podrzędne, warunki pierwszego (id=4) mają priorytet 5, a drugiego (id=5) mają priorytet 10.

Gdy rozmówca wypowiada frazę, robot otrzymuje tekst, który został już rozpoznany i może się zdarzyć, że zostanie on dopasowany do obu węzłów podrzędnych. Jeśli jednak określono priorytety, w tym przypadku jest on wyższy dla drugiego węzła. Najpierw więc sprawdzamy jego warunki, upewniamy się, że tekst do nich pasuje, a następnie przechodzimy do węzła podrzędnego 2. Nie ma potrzeby sprawdzania warunków węzła 1.
- Jeśli warunki zostaną spełnione, rozpoznany tekst zostanie zapisany w zmiennej wywołania. Umożliwia to zapisanie rozpoznanego tekstu w zmiennej wywołania i użycie go później w wartościach dynamicznego przetwarzania zdarzeń. Zmienne są przechowywane przez cały czas trwania wywołania, a nie tylko tak długo, jak działa robot. Jeśli wartość jest zapisywana do zmiennej więcej niż raz w ramach tego samego wywołania, zapisywany jest ostatni wpis.
Warunki można ustawić na kilka sposobów:
1. ustawić listę warunków ręcznie

2. wybrać profil warunków projektu

Skład profilu można zobaczyć, klikając przycisk „Pokaż warunki profilu”; nie można edytować profilu.
3. wybierz profil warunków UniTalk

Zawartość profilu można zobaczyć, klikając przycisk „Pokaż warunki profilu”, nie można edytować profilu.
Dla wygody nazwy profili UniTalk są poprzedzone krótką nazwą języka w nawiasach kwadratowych – UA, RU, EN itp. Wybierając profil, można wpisać prefiks w polu wyszukiwania i wyświetlić listę profili w interesującym nas języku.

Przedrostek wskazuje język, w którym frazy powinny znajdować się w profilu, ale nie oznacza, że profil będzie zawierał frazy tylko w tym języku. Na przykład profile z prefiksem UA zawierają frazy w dwóch językach – ukraińskim i rosyjskim.
Warunki przejściowe
- Warunki przejścia obejmują grupę warunków

Przejście do bieżącego węzła zostanie wykonane, jeśli rozpoznany tekst w węźle nadrzędnym spełnia warunki przejścia do bieżącego węzła. Tekst spełnia warunki, jeśli spełnione są wszystkie warunki co najmniej jednej z grup. Na przykład, bieżący węzeł ma następujące warunki przejścia:

Podsumujmy warunki przejścia.
– Przejście zostanie wykonane, jeśli rozpoznany tekst zawiera jedną z fraz „spróbujmy” lub „możemy spróbować” i nie zawiera frazy „niezainteresowany” (tj. spełnione są wszystkie warunki z grupy 1).
– lub przejście zostanie wykonane, jeśli odkryta zostanie jakakolwiek cyfra (tj. spełnione zostaną wszystkie warunki z grupy 2).
W kategoriach technicznych, logiczny „AND” oznacza pomiędzy warunkami w grupie, a logiczny „OR” oznacza pomiędzy grupami warunków.
- Dodawanie warunków
Grupę można dodać, klikając przycisk „Dodaj warunek LUB”:

Dodaj warunek do grupy, klikając przycisk „Dodaj warunek AND”:

Następnie pojawi się okno z warunkami. Po kliknięciu na warunek zostanie on dodany do grupy.

Wyświetlane są tylko główne warunki. Aby wyświetlić je wszystkie, kliknij przycisk Pokaż wszystkie.

Ustawienia ogólne dla akcji węzła

Ustawienia akcji opisują, co stanie się po przejściu do bieżącego węzła. Po kliknięciu bloku warunku otwiera się pasek boczny z ustawieniami akcji węzła.
Lista ustawień różni się w zależności od typu akcji wybranego w ustawieniach akcji.
Ustawienia ogólne (dostępne dla każdego typu akcji):
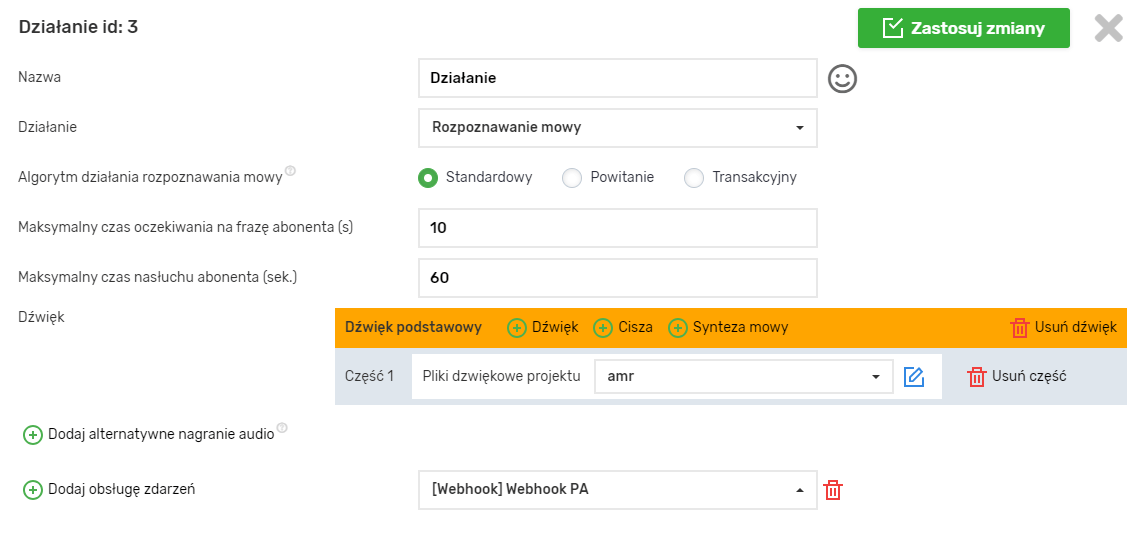
- Nazwa ma maksymalną długość 40 znaków, a po prawej stronie dodano emotikon, którego można użyć do dodania emoji.
- Akcja – typ akcji węzła.
- Dźwięk – będzie odtwarzany po kliknięciu węzła. Jest to pole wymagane dla typów akcji Rozpoznawanie mowy i Odtwarzanie dźwięku. Dźwięk można odsłuchać, klikając przycisk Odtwórz dźwięk.

- Programy obsługi zdarzeń – można dodać do 5 programów obsługi zdarzeń, które będą wywoływane po przejściu do węzła.
Akcja rozpoznawania mowy
Węzeł główny robota bez tła może mieć tylko typ akcji „Rozpoznawanie mowy”.
Tylko węzły z typem akcji Rozpoznawanie mowy mogą mieć węzły podrzędne. Węzły z innymi typami akcji nie mają przycisku umożliwiającego dodanie węzła podrzędnego. Jeśli węzeł z typem akcji Rozpoznawanie mowy ma węzły podrzędne i zmienisz jego typ akcji na inny, węzły podrzędne zostaną usunięte.

Węzeł z typem akcji Rozpoznawanie mowy nie może być ostatnim węzłem w gałęzi, a drzewo nie zostanie zapisane.

Sposób działania akcji rozpoznawania mowy i dostępne dodatkowe ustawienia zależą od ustawienia „Algorytm akcji rozpoznawania mowy”.

Algorytm jest prosty
Rozpoznaje słowa rozmówcy i, w zależności od rozpoznanego tekstu, przełącza się na jeden z węzłów podrzędnych lub na jednego z robotów w tle (jeśli są one określone w ustawieniach głównych).
Ustawienia szczegółowe:
- Maksymalny czas oczekiwania na wypowiedź rozmówcy – maksymalny czas, przez jaki robot będzie czekał, aż rozmówca zacznie mówić (od 1 do 60 sekund).
- Maksymalny czas słuchania rozmówcy – maksymalny czas, przez jaki robot będzie słuchał wypowiedzi rozmówcy po rozpoczęciu mówienia (od 1 do 600 sekund).
- Alternatywne audio (przycisk Dodaj alternatywne audio) – opcjonalne. Można określić dowolną liczbę alternatywnych dźwięków. Są one odtwarzane po wyjściu robota z tła, jeśli nie zostaną określone, główny dźwięk zostanie odtworzony ponownie.
Alternatywny dźwięk może być przydatny, gdy chcesz, aby dialog rozmówcy z robotem głosowym był jak najbardziej podobny do dialogu z żywą osobą. Jeśli główny robot przełączy się na robota w tle, po wyjściu z robota w tle użytkownik powróci do węzła, z którego przełączył się na robota w tle, a dźwięk tego węzła zostanie odtworzony ponownie. Ludzie zazwyczaj nie wypowiadają dokładnie tych samych fraz. Możesz określić alternatywny dźwięk, który jest podobny do głównego dźwięku, ale nie dokładnie taki sam. Następnie, gdy dzwoniący wyjdzie z robota w tle, usłyszy frazę, która jest do niego podobna, ale nie dokładnie taka sama.
Dźwięk jest odtwarzany w kółko. Na przykład, jeśli określisz główny dźwięk i 2 alternatywne dźwięki, główny dźwięk będzie odtwarzany po przełączeniu do węzła, po przełączeniu do robota w tle i powrocie – alternatywny dźwięk 1, jeśli ponownie przełączysz się i wrócisz z robota w tle – alternatywny dźwięk 2, ponownie do robota w tle i wrócisz z niego – główny dźwięk i tak dalej w kółko.
Właściwości:
- Może mieć więcej niż jeden węzeł podrzędny. Musi mieć co najmniej jeden węzeł podrzędny.
- W warunkach przejścia do węzłów podrzędnych można określić specjalny warunek typu „Dowolny tekst jest rozpoznawany” nie więcej niż raz
- Podczas przełączania do węzłów podrzędnych można określić specjalny warunek typu „Subskrybent milczy i upłynął czas oczekiwania” nie więcej niż jeden raz.
- W warunkach przejścia do węzłów podrzędnych warunek specjalny „Rozpoznany tekst nie spełnia żadnego z warunków, a czas oczekiwania upłynął” musi zostać określony jeden raz. Z tego powodu, jeśli klikniesz przycisk dodawania węzła, gdy węzeł z algorytmem rozpoznawania mowy „Normalny” nie ma dzieci, nie zostanie dodany jeden węzeł, ale dwa węzły naraz, z których jeden będzie miał warunek „Rozpoznany tekst nie spełnia żadnego z warunków i upłynął czas oczekiwania”, ale nie musisz opuszczać tego węzła, ten warunek można ustawić w dowolnym innym węźle. To tylko dla wygody, ponieważ warunek jest wymagany, dlaczego nie dodać go automatycznie.

Algorytm pracy:
1. Dźwięk jest odtwarzany
2. Po zakończeniu odtwarzania dźwięku, jeśli dzwoniący nie zaczął mówić w ciągu „Maksymalnego czasu oczekiwania na frazę dzwoniącego”, dzwoniący jest przenoszony do węzła zawierającego warunek „Dzwoniący milczy, a czas oczekiwania upłynął” lub, jeśli ten warunek nie występuje, dzwoniący jest przenoszony do węzła z warunkiem „Rozpoznany tekst nie spełnia żadnego z warunków, a czas oczekiwania upłynął”.
3. Jeśli dzwoniący zacznie mówić, system rozpoznawania mowy czeka na ostateczny wynik rozpoznawania w ciągu „Maksymalnego czasu, w którym dzwoniący może słuchać”. Jeśli ostateczny wynik rozpoznawania nie zostanie odebrany w tym czasie, zostanie odebrany ostatni pośredni wynik rozpoznawania.
4. Otrzymany wynik rozpoznawania jest sformatowany:
- z tekstu usuwane są wszystkie znaki oprócz liter, cyfr i spacji
- tekst jest konwertowany na małe litery
- wielokrotne spacje między wyrazami są zastępowane pojedynczymi spacjami
- spacje na początku i końcu tekstu są usuwane
5. Po otrzymaniu wyniku rozpoznania wyszukiwany jest węzeł z odpowiednimi warunkami przejścia:
- Najpierw sprawdzane są warunki przejścia do węzłów podrzędnych, z wyjątkiem warunków specjalnych. Węzły są sprawdzane w kolejności zależnej od priorytetu określonego w ustawieniach warunków, od najwyższego do najniższego. Jeśli znajdziemy węzeł z odpowiednią grupą warunków, przechodzimy do niego.
- Jeśli nie znajdziemy odpowiedniego węzła wśród węzłów podrzędnych, sprawdzamy warunki przełączania na roboty w tle (określone w węźle głównym). Roboty w tle są sprawdzane w kolejności zależnej od priorytetu określonego w ustawieniach warunków węzła głównego, od najwyższego do najniższego. Jeśli znajdziemy robota tła z odpowiednią grupą warunków, przełączamy się na niego.
- Jeśli nie ma żadnych robotów w tle lub nie znaleziono odpowiedniego robota w tle, jeśli istnieje węzeł podrzędny z warunkiem „Rozpoznano dowolny tekst”, przełączamy się na niego, w przeciwnym razie przełączamy się na węzeł podrzędny z warunkiem „Rozpoznany tekst nie spełnia żadnego z warunków i upłynął czas oczekiwania”.
Algorytm powitania
Zaprojektowany, aby powitać użytkownika. Po odebraniu telefonu abonent może od razu coś powiedzieć lub może milczeć, dopóki nie zostanie mu coś powiedziane, algorytm ten bierze to pod uwagę.
Podczas tworzenia nowego robota, węzeł główny jest automatycznie tworzony z algorytmem powitania, ale nie jest to konieczne, każdy algorytm może być określony w węźle głównym.
Ustawienia szczegółowe:
- Zakończ powitanie, jeśli usłyszysz „Hello” – jeśli robot głosowy otrzyma pośredni wynik rozpoznania z frazą „Hello”, dźwięk zostanie odtworzony natychmiast i nastąpi przeniesienie do następnego węzła.
- Maksymalny czas oczekiwania na frazę abonenta wynosi od 1 do 60 sekund.
- Maksymalny czas nasłuchiwania abonenta wynosi od 1 do 600 sekund.
Właściwości:
- Węzeł może mieć tylko jeden węzeł podrzędny. Jeśli przełączysz algorytm na „Normalny”, dodasz kilka węzłów podrzędnych i powrócisz do algorytmu „Powitalny”, ustawienia robota nie zostaną zapisane, a strzałki do węzłów podrzędnych będą migać na czerwono.

- Nie jest wykonywane przejście do robota w tle.
- Ponieważ istnieje tylko jeden węzeł podrzędny i nie może być przejścia do robota w tle, węzeł podrzędny nie musi określać warunków przejścia (nie są one obecne).

Algorytm pracy:
- Jeśli ostateczny wynik rozpoznawania zostanie odebrany z systemu rozpoznawania mowy w czasie krótszym niż „Maksymalny czas oczekiwania na frazę rozmówcy”, dźwięk zostanie odtworzony, a robot przełączy się do węzła podrzędnego.
- Jeśli rozmówca zacznie mówić w ciągu „Maksymalnego czasu oczekiwania na frazę rozmówcy”, robot poczeka, aż rozmówca skończy (aż do otrzymania ostatecznego wyniku), ale nie dłużej niż „Maksymalny czas słuchania rozmówcy”. Następnie dźwięk zostanie odtworzony, a robot przełączy się do węzła podrzędnego.
- Jeśli abonent nie zaczął mówić w ciągu „Maksymalnego czasu oczekiwania na frazę abonenta”, oczekuje się, że ostateczny wynik rozpoznawania nie będzie dłuższy niż „Maksymalny czas słuchania abonenta”.
- Jeśli ostateczny wynik rozpoznania zostanie odebrany, dźwięk zostanie odtworzony, a połączenie zostanie przekazane do węzła podrzędnego.
- Jeśli ostateczny wynik nie zostanie odebrany, ale dzwoniący nie jest cichy, dźwięk zostanie odtworzony, a połączenie zostanie przekazane do węzła podrzędnego.
- Jeśli abonent milczy, połączenie zostanie zakończone.
Algorytm przechodni
Algorytm ten po prostu odtwarza dźwięk i przesyła go do węzła podrzędnego. Nie ma on żadnych specyficznych ustawień.
Funkcje są takie same jak w przypadku algorytmu powitania:
- Węzeł może mieć tylko jeden węzeł podrzędny. Jeśli istnieje kilka węzłów podrzędnych, strzałki prowadzące do nich będą migać na czerwono, a ustawień robota nie będzie można zapisać.
- Przełączanie na robota w tle nie jest wykonywane
- Nie określono żadnych warunków dla węzła podrzędnego
Algorytm pracy:
- Dźwięk jest odtwarzany
- Po zakończeniu odtwarzania dźwięku rozmówca jest przenoszony do węzła podrzędnego. To, co mówi rozmówca, nie jest sprawdzane, a nawet jeśli mówi, rozpoznany tekst nie jest zapisywany w historii robotów.
Akcja „Przełącz na inny węzeł”
Ta akcja umożliwia nawigację do dowolnego węzła w drzewie.
Specyficzne ustawienia:
- go to node with id – identyfikator węzła, do którego zostanie wykonane przejście

Właściwości:
- Nie ma żadnych dzieci
- Animowana kropkowana fioletowa strzałka powinna prowadzić do określonego węzła.

Ograniczenia:
- zabronione jest przechodzenie do bieżącego węzła
- zabronione jest przechodzenie do węzła z akcją typu „Przejdź do innego węzła”
- zabronione jest przechodzenie do węzła nadrzędnego, jeśli nie ma on dzieci innych niż bieżący węzeł
W przypadkach opisanych w ograniczeniach i jeśli nie określono identyfikatora węzła, do którego ma nastąpić przeskok, lub określono nieistniejący identyfikator węzła:
- nie można zapisać ustawień robota
- w pobliżu pola wprowadzania identyfikatora problem zostanie opisany na czerwono
- czerwona kropkowana strzałka będzie kierować się w dół od bieżącego węzła

Przykład:
W pracy należy zadać 2 pytania pod rząd, a następnie wykonać tę samą akcję. Pierwsze pytanie: jaka jest metoda płatności (gotówka lub karta), drugie: jaka jest metoda dostawy (kurier, poczta), akcja: kasa.
Bez akcji „Przejdź do innego węzła” otrzymasz 2 identyczne gałęzie:

Korzystając z opcji „Przełącz na inny węzeł”, można uniknąć duplikacji:

Zamiast dwóch akcji, w których pytamy o metodę dostawy, jest tylko jedna, warunki „Kurier” i „Poczta” są ustawiane raz, zamiast czterech akcji kasy jest tylko jedna, ale logika pracy pozostaje taka sama.
Prace podstawowe
Istnieją frazy lub pytania, które rozmówca może wypowiedzieć w dowolnym momencie dialogu. Aby uniknąć opisywania tej logiki w każdym węźle, można użyć pracy w tle
Funkcje:
- Roboty tła to roboty, które mogą być używane tylko w normalnych (nie tła) robotach, określonych w ustawieniach głównych. Można je wywołać na dowolnym węźle głównego robota z typem akcji rozpoznawania mowy i algorytmem „Normalny”.
- Roboty tła są uważane za część głównego robota:
– nie można określić ustawień rozpoznawania mowy w ustawieniach głównych, używane są ustawienia robota głównego;
– w historii połączeń roboty działające w tle nie są wyświetlane w przekierowaniach połączeń;
– roboty działające w tle nie są zapisywane w historii robotów, ale znajdują się w przekierowaniach robotów głównych.
- Roboty działające w tle działają na tej samej zasadzie, co zwykłe roboty. Zaczynając od węzła głównego, poruszają się do węzła końcowego. Jeśli węzeł końcowy robota w tle ma typ akcji „Wyjdź z robota głosowego”, powróci on do robota głównego w tym samym węźle, z którego przełączył się na robota w tle. W przypadku innych typów akcji węzła końcowego robota w tle, zarówno robot w tle, jak i robot główny zakończą działanie.
- Warunki przełączania do robota w tle są określone w samym robocie w tle w bloku warunków węzła głównego.

- Roboty działające w tle nie mogą być używane w skryptach przychodzących, robotach głosowych i wywołaniach API.
- Na stronie robotów są one wyświetlane w sekcji Background dialogues.

Przykład:
Dzwoniący może powiedzieć „nie dosłyszałem”, „proszę powtórzyć” lub coś podobnego w dowolnym momencie dialogu. Byłoby miło odtworzyć dźwięk dla dzwoniącego po zakończeniu rozmowy. Możesz utworzyć robota w tle z warunkami przejścia „nie słyszałem”, „powtórz” itp., określić typ akcji „Wyjdź z robota głosowego” i dodać tego robota w tle do ustawień głównego robota.

Za każdym razem, gdy subskrybent wypowie jedną z wymienionych fraz, każdy węzeł w drzewie z rozpoznawaniem mowy przy użyciu algorytmu „Normalny” zostanie zidentyfikowany:
- zostanie wykonane przejście do robota w tle
- natychmiastowe wyjście z robota w tle (akcja w węźle głównym – „Wyjdź z robota głosowego”)
- powrót do tego samego węzła głównego robota
- główny dźwięk węzła lub alternatywny dźwięk (jeśli został określony) zostanie odtworzony ponownie
Panel dodatkowych przycisków węzła

Po najechaniu kursorem na węzeł, po prawej stronie pojawi się panel z przyciskami
1. Przesunięcie węzła w lewo/prawo wśród dzieci węzła nadrzędnego

- Nie ma to wpływu na logikę robota, zmienia się tylko obraz drzewa;
- przykład poruszania się:
do

po (jeśli klikniesz na węzeł z id=3, przesunie się on w lewo, węzły były w kolejności 2, 3, 4, a teraz 3, 2, 4)

- jeśli węzeł nadrzędny ma tylko jeden węzeł podrzędny (bieżący), wówczas przyciski lewy/prawy nie będą wyświetlane na bieżącym węźle

- jeśli bieżący węzeł jest najbardziej na lewo wśród dzieci węzła nadrzędnego, lewy przycisk będzie nieaktywny

- jeśli bieżący węzeł jest najbardziej na prawo wśród dzieci węzła nadrzędnego, przycisk po prawej stronie będzie nieaktywny.
2. Zmiana kolorów węzłów i gałęzi

- umożliwia zmianę koloru paska po lewej stronie węzła

- przycisk „Kolor” umożliwia ustawienie koloru linii bieżącego węzła

- przycisk „Kolor gałęzi” umożliwia ustawienie koloru linii bieżącego węzła

- po naciśnięciu tych przycisków można wybrać kolor z palety

3. Kopiowanie węzłów i gałęzi

- przycisk „kopiuj”
- przycisk „kopiuj gałąź”
Można kopiować węzły w jednej pracy i wklejać je do innej, ale w ramach tego samego projektu.
4. Przycisk „Wstaw”

- Umożliwia wklejenie wcześniej skopiowanych lub wyciętych węzłów do elementów podrzędnych bieżącego węzła.
- Wklejone węzły otrzymują nowe identyfikatory.
- Po skopiowaniu przycisk nie będzie widoczny, jeśli bieżący węzeł nie może mieć dzieci lub jeśli może mieć tylko jedno dziecko, które już istnieje.
5. Przycisk „Cut”

- Umożliwia wycięcie gałęzi po kliknięciu gałąź zostanie skopiowana do pamięci, a następnie pojawi się przycisk „Wklej”. Do momentu kliknięcia przycisku „Wklej” gałąź pozostanie na swoim miejscu.
- Wstawianie nie jest dostępne w węźle nadrzędnym i w węzłach podrzędnych bieżącego węzła.
Ustawianie końca robota
Gdy robot zakończy pracę, obliczane są różne parametry: przyczyna zakończenia, czas trwania i typ węzła, w którym robot zakończył pracę. Dane dotyczące pracy robota są zapisywane w historii.
1. Powód wypowiedzenia:
- Zakończono normalnie – robot osiągnął punkt końcowy
- Abonent zakończył połączenie – abonent rozłączył się
- Abonent milczał podczas powitania – abonent milczał przez cały czas oczekiwania na węźle z rozpoznawaniem mowy i algorytmem powitania
- Automatyczna sekretarka rozpoznana
- Błąd rozpoznawania mowy – rozpoznawanie mowy zostało przerwane z przyczyn technicznych
- Przekroczono limit przejechanych węzłów – w jednym przejeździe robota można przejechać maksymalnie 200 węzłów, wliczając w to węzły robotów w tle. Jest to zabezpieczenie przed zapętlaniem się robotów.
- Przekroczono limit ukończonych akcji „Przejdź do innego węzła” – w jednym przebiegu robota można przekroczyć maksymalnie 20 węzłów z akcją typu „Przejdź do innego”, w tym węzły robotów w tle. Jest to zabezpieczenie przed zapętleniem robota
- Nieznany błąd – nieznany błąd podczas działania robota
2. Czas pracy robota
Czas trwania jest wskazywany w historii robota i w odpisach. Jest on liczony od momentu uruchomienia robota do momentu zakończenia audio punktu końcowego (działanie punktu końcowego nie jest wliczane do czasu trwania) lub do momentu zakończenia działania robota z innego powodu. Liczba sekund jest zaokrąglana w górę. Na przykład 14,3 sekundy jest zaokrąglane w górę do 15 sekund.
3. Typ węzła, w którym zadanie zostało zakończone
- Pośredni – robot zakończył działanie na węźle pośrednim (nie końcowym).
- Successful – robot zakończył działanie na węźle końcowym, a w ustawieniach akcji typ węzła końcowego jest określony jako „Successful”.
- Nieudane – robot zakończył się na węźle końcowym, a typ węzła końcowego jest określony jako „Nieudany” w ustawieniach akcji.
- Tło – połączenie zostało zakończone na robocie w tle
- Background – call transfer – połączenie zakończyło się na robocie w tle, a pole wyboru „Background robot – call transfer” jest włączone w głównych ustawieniach robota w tle.
Szczegółowa praca w edytorze Robota głosowego pozwala osiągnąć maksymalną precyzję i efektywność w automatyzacji dialogu. Wykorzystując priorytety warunków, zadania w tle do obsługi nieoczekiwanych fraz oraz akcję „Przejdź do innego węzła” w celu uniknięcia duplikowania logiki, budujesz złożone, a zarazem przejrzyste i sterowalne scenariusze. Zapewnia to wysoki odsetek pomyślnie zakończonych rozmów, minimalizuje błędy i sprawia, że Twój robot funkcjonuje jak idealnie przeszkolony konsultant.
BEZPŁATNA KONSULTACJA